建造方式的拓展必然对设计方法论产生直接的推动作用,正如Mario Carpo在The Alphabet and the Algorithm一书中将数字时代的技术精髓定义为“开放性、可变性,互动和参与”,以参数化设计为代表的数字化技术可能将设计带入一个以通用物体(generic objects)的著作权为标志的时代。数字作者不再仅仅设计图纸(drawings)、模型(physical models)和建筑物(buildings)等传统的建筑产品,而是设计通用对象(objectiles),即程序、系列或者生成符号(generative notation)。远届|数字实验室团队成员始终在参与这令人激动的变革中,并且致力于推动和推广智能建造技术的普及和应用。
远届|数字实验室 将目前可实现的智能营造方式分为机械臂营造和机器人自组织两种大类型,其中机械臂营造的方式有机械臂减材式营造、机械臂增材式营造、机械臂辅助营造。在两种大类型中,机械臂营造是目前技术和实践意义更为成熟的类型;机器人自组织作为一种指导性的探索方向,也是我们在技术和方法上关注的重点。目前远届|数字实验室团队研究方向和成果所涵盖的主要有机械臂减材式营造、机械臂增材式营造和机器人自组织。
机械臂减材式营造
在减材制造中,物体从实心体块中雕刻出来的,而CNC数控铣削是最常见的工序。机械臂的引入扩大了CNC铣削的可能性,运动轴的数量越多,功能越强。激光切割、热线切割和传统的模型制作技术,也都属于减法制造的范畴。

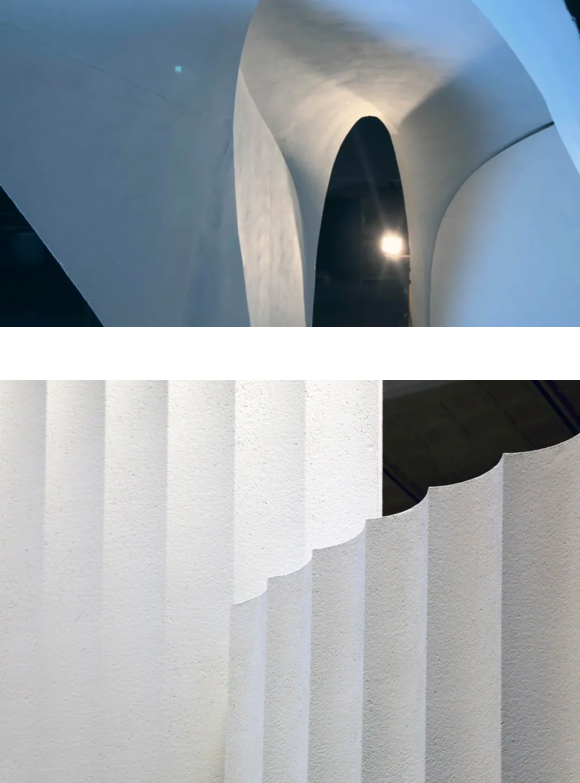
机器人热线切割一直是多年来远届数字实验室技术团队的研究主题。该案例为远届数字实验室团队成员与Autodesk公司的合作项目。该项目在与Autodesk合作的过程中展示了在学术研究之外该技术的商业应用和开发,并展示了其在建筑行业的品质。尽管可以按照零高斯曲率(或直纹曲面)切割许多材料,但我们将研究范围扩大到膨胀聚苯乙烯(EPS)块。通过机械臂路径获得的正形状对应于模板,然后在其中浇铸或喷射混凝土。


机器人HWC技术通常使用高电阻的直加热镍铬合金丝。这将指导和确定直纹曲面或零高斯曲率几何体的形式化设计,因为直纹曲面是通过几何体上直线段的平滑序列来实现的。建筑中的直纹表面设计已被用于创建复杂的建筑几何形状。一个标志性的例子是安东尼·高迪(Antoni Gaudi)在他的杰作圣家堂中的体现的形式。

不仅如此,该技术也可以对金属丝进行成形,以研究超出直纹表面的范围并探索更多的几何可能性。目前正在开发使用多个机器人进行非直线切割的研究,可以通过这种技术打开形式上的更多可能性。

我们通过考虑未来的生活、工作和文化来探索建筑的扩展关系,并利用数字技术作为工具来探索可能性。先进的计算开发可以用于追求适应性、生成性和行为化的建筑系统。可移动、可转换、动态和机器人的建筑都是我们研究内容的一部分,旨在扩展学科、并在更大的文化和技术领域内推动设计极限。
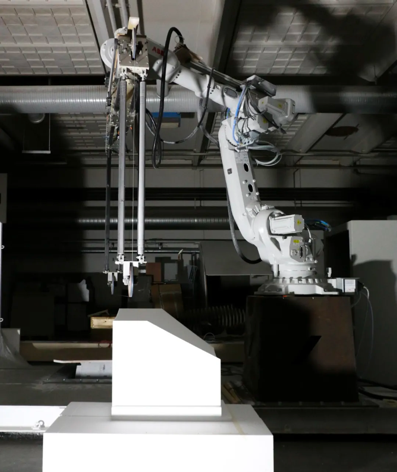
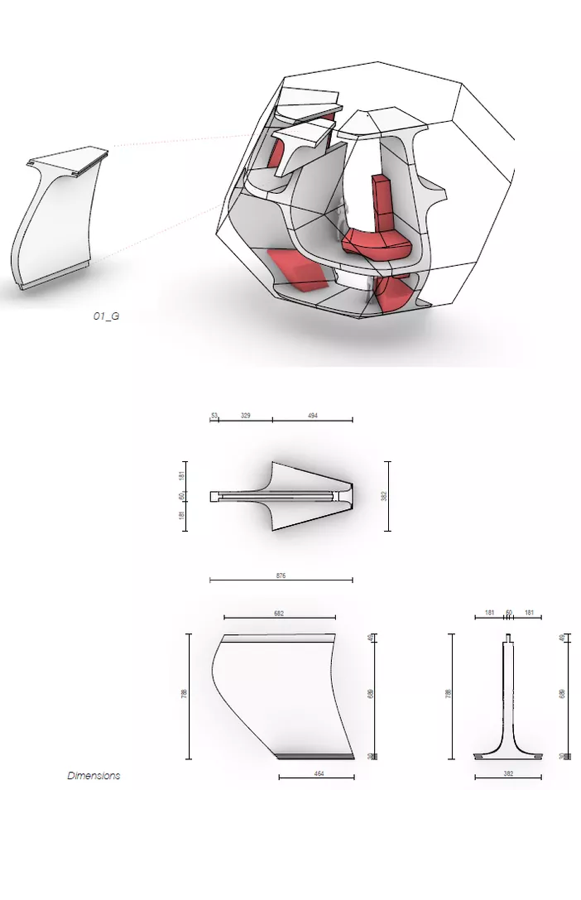
远届|数字实验室技术团队成员与丹麦的Odico模板机器人公司合作,开发先进的机器人热丝切割和机器人磨料线切割预制构件。2018年11月,我们在工厂花了3个星期的时间,制造了一个包含50个组件的生活单元迭代的实际规模原型。

机械臂减材式营造
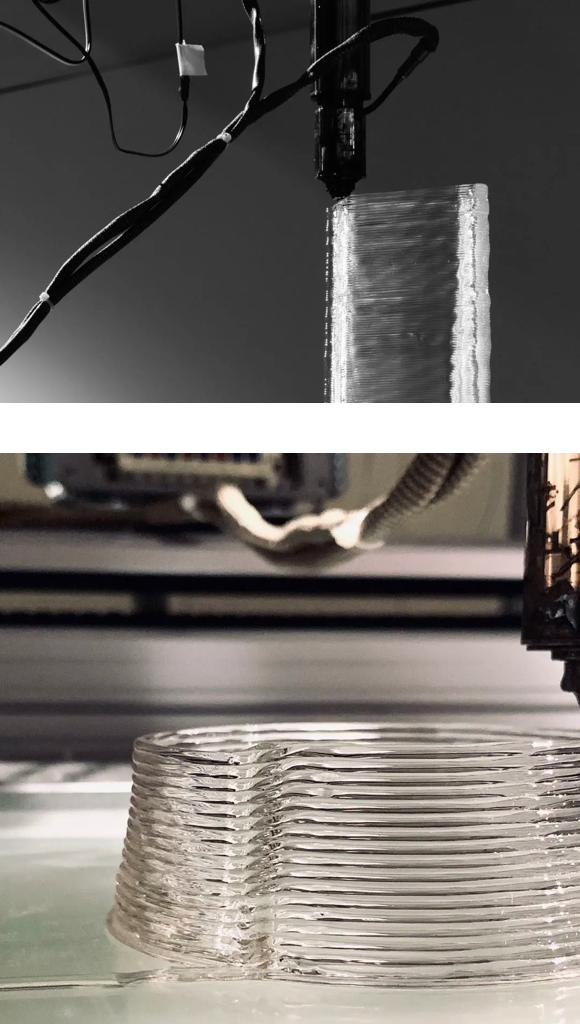
3D打印技术,亦称增材制造(Add material manufacture)技术,其原理是3D打印机运用CAD创建的模型设计为模板,不需要传统刀具、夹具和机床,通过打印机软件将其创建的模型先分解为若干个二维的层面,然后将材料通过喷嘴等装置逐层堆积,就可以打造出任意形状,最终形成3D物件成品。建筑3D打印正是利用分层堆积的基本原理,采用工业机器人逐层重复铺设材料层构建自由形式建筑结构的新兴技术。主要成型方法包括喷墨粘稠粉末(3DP)、熔融挤出(FDM)、压电喷墨、气动、电动和电流体、动力注射式等。

机器人自组织

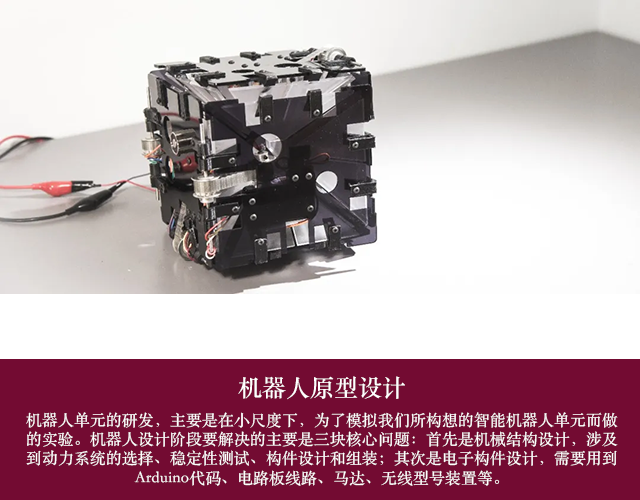
该项目是远届|数字实验室团队成员在AA建筑联盟学院的研究项目。该项目从审视当前的城市中的文化空间开始,提出了利用机器人自组织的方式将艺术展览去中心化、去实体化的解决方案。在项目的过程中,我们探索了立方体的变形和潜在的组合方式,并论证了移动性的实现可能。在确定了以立方体为单元形体之后,该项目通过对立方体-金字塔【Cube-Pyramids】系统的数学研究,得到了所有可能形态的数据库。
在数据库搭建完成之后,我们用"PIA"值的定义概念,来对所有形体进行再次定义,以方便之后的形态组合研究。形态组合研究过程,由于可能性和复杂度的庞大,在此不加赘述。